


【科學講堂】氣泡技術製人造肌肉 可按壓心臟輔助醫療
- 普通話
- 廣東話
- 超大
- 大
- 標準
- 小
當今機器人已擁有諸多卓越能力,但在模仿生物柔軟肌肉方面,仍面臨巨大挑戰。這一難題正推動「軟體機器人科技」這一新興領域的發展,其目標是製造出具有仿生柔軟肌肉的機器人。該技術不僅能改良義肢,更有望開發出侵入性更低、能通過觸感與病人互動的醫療器械。最近,一項創新研究利用氣泡技術,成功研發出可通過超聲波遙控形變的人造肌肉,為這一領域帶來嶄新突破。
在長達十億多年的演化歷程中,生物體的肌肉系統不斷精進——從最初生物體的簡單收縮結構,發展至今形態各異、功能複雜的肌肉組織:例如昆蟲飛行肌每秒可收縮數百次,驅動翅膀高速拍動;人類的骨骼肌則既能精準控制四肢位移,又能同時維持身體整體平衡。
生物肌肉的多樣性,建立在兩大基礎原則之上:一是多層級結構,肌肉由大量重複的肌原纖維構成,通過協同作用在宏觀層面產生力量;二是精準的神經控制,脊椎動物能通過調節神經信號的頻率,來單獨激活特定肌肉,從而控制收縮的力度、速度與精度。過去的人造肌肉技術難以同時滿足這兩項原則,而最新的氣泡技術研究,則在此基礎上實現了重要突破。
超聲共振控制發力
液體中的氣泡看似脆弱,但它與許多物質一樣,會對特定頻率的超聲波產生共振反應。其共振頻率取決於氣泡尺寸,因此可藉由調整超聲波頻率,來選擇性地控制不同大小的氣泡。當氣泡處於共振狀態時,會劇烈振動,從而在周圍液體中產生強勁的微觀流動與作用力。這項技術已在醫療領域展開多項應用,例如協助藥物突破血腦屏障,或實現定點、定時的靶向釋放。
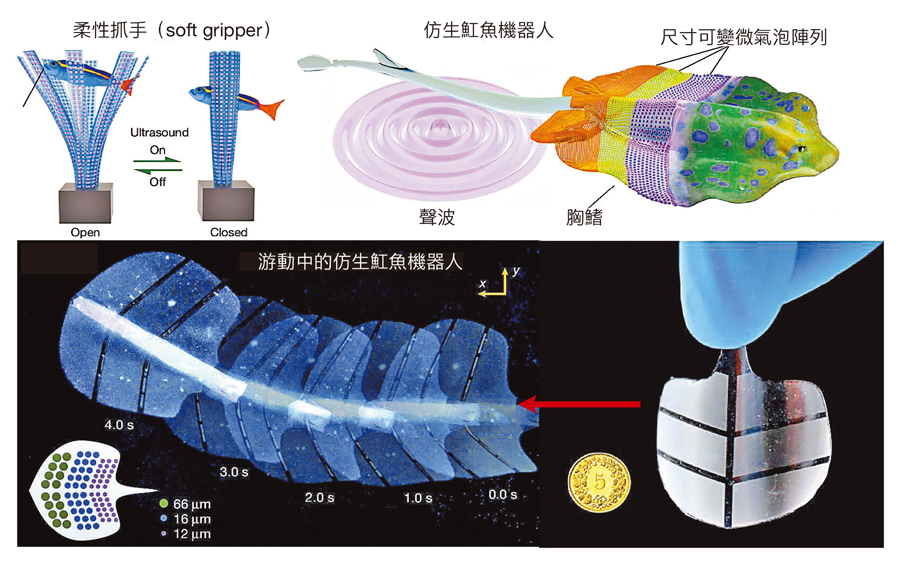
瑞士蘇黎世聯邦理工學院施展博士和張志遠博士研究團隊將數以千計的微氣泡嵌入軟質聚合物材料中,成功開發出由超聲波激活的無線人造肌肉。該系統無需電線、電池或其他外部電子設備,即能模仿生物肌肉的多種動作,如抓握物體、彎曲甚至游泳,較好地滿足了前述的結構與控制兩大原則。
研究中更展示,這類人造肌肉能施加恰到好處的力度,安全抓取細小的斑馬魚而不造成損傷,且設備本身不會明顯發熱。在實驗室環境下,團隊還依照豬心臟的外形貼附人工肌肉,並通過超聲波成功模擬了對心臟的按壓動作,演示了該技術在未來醫療輔助中的潛在應用方向。
儘管前景看好,這項技術仍面臨挑戰。例如,當超聲波信號源與人造肌肉的距離從一厘米增加至五厘米時,因信號強度減弱,肌肉的活動幅度會降至原來的一半。因此,要實現人體內的有效應用,還需研發能在生物體內增強或中繼信號的配套方法。
小結
這項基於氣泡與超聲波的人造肌肉技術,為未來醫療機器人與軟體器械的發展開闢了新方向。然而,該技術目前尚未在病床等真實、複雜環境中進行驗證。期待相關技術難題能在不遠的將來得到攻克,使這項柔軟而強大的科技早日服務於人類健康。
●杜子航 教育工作者 早年學習理工科目,一直致力推動科學教育與科普工作,近年開始關注電腦發展對社會的影響。
 0
已點過讚
0
已點過讚
評論(0)
0 / 255