


科大研新型人工複眼 助無人機「開眼界」
- 普通話
- 廣東話
- 超大
- 大
- 標準
- 小
香港文匯報訊(記者 高鈺)香港科技大學工學院的研究團隊最近成功研發了一個新型人工複眼,不僅於小範圍區域的靈敏度較市場產品高兩倍以上,成本亦更低。新技術有望革新機械人視覺系統,並可提升機械人的導航、感知、決策及機群合作等能力,為人機協作開拓更大的商業應用與發展潛力,包括配合無人機提升在災難事故現場偵測搜救的效率和精準度,長遠更可有效提升及改善無人駕駛的安全性,加快智能化交通系統的應用。
提升災難現場搜救效率
新型人工複眼由科大電子及計算機工程學系和化學及生物工程學系講座教授范智勇領導研發。2020年,他成功研發全球首隻具有3D視網膜的球狀人造眼,是次複眼研究進一步推進了仿生視覺系統領域發展。
過去,機械人專家參照昆蟲複眼的廣闊視野和動態捕捉功能特性,為機械人製造人工複眼。然而,由於電子器件變形過程的複雜性和不穩定性,以及光學元件與探測器不匹配等技術問題,這種複眼系統較難整合到如機械人或無人機等自主平台中。
范智勇的團隊利用新材料和結構開發的針孔複眼視覺系統,可針對該問題提供解決方案。系統具備多個特點,包括一個內置的半球狀鈣鈦礦納米線陣列圖像傳感器、能擴大成像視野的高像素密度,以及一個利用3D打印的無鏡片針孔陣列;這個陣列的布局可任意定製,有助調節入射光並消除相鄰小眼(即複眼的獨立細小組成部分)之間的盲區。
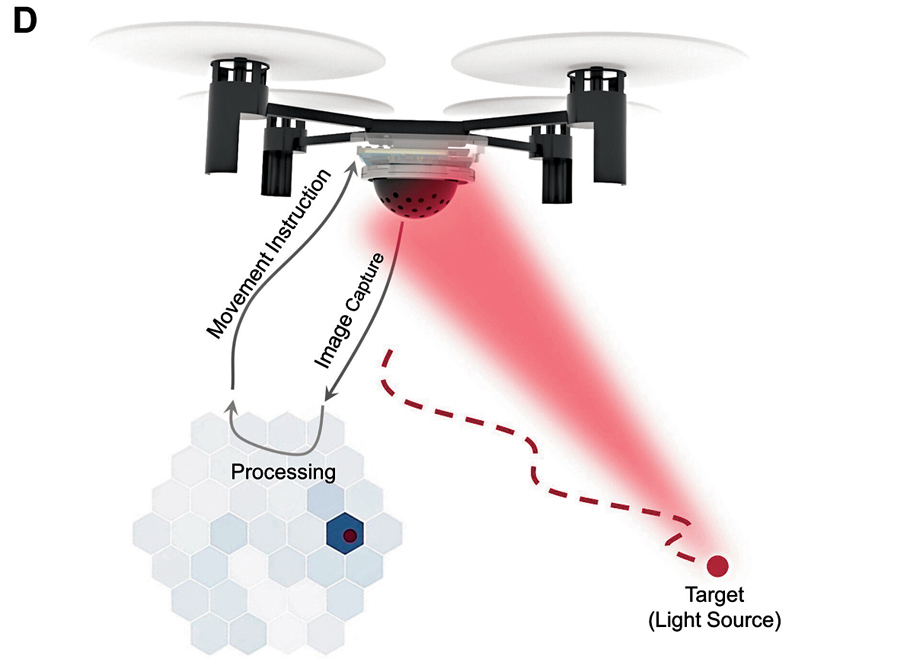
整個針孔複眼系統有超廣闊的視野,更可作出多元的角度選擇,在單眼及雙眼配置中均能對寬闊光譜作回應,助其準確定位目標。團隊把具有動態捕捉功能的複眼安裝在無人機上,成功實現了對移動四足機械人的實時動態捕捉。
范智勇介紹,「複眼設計的優勢在於簡單、輕便和低成本,雖然它不會完全取代傳統相機,但在某類機械人應用中,例如近距離編隊飛行的無人機群,具有理想的發展潛力。隨着未來進一步縮小器件尺寸,及增加小眼數量、成像解析度和響應速度,這類設備將在光電子和機械人領域有廣泛的應用。」
該項研究已於國際頂級期刊《科學機械人》上發表,更獲選為封面文章。范智勇團隊的博士後研究員周宇、孫梽博,和博士生丁宇宬為共同第一作者。
 0
已點過讚
0
已點過讚
評論(0)
0 / 255