


【科創獻港力】鑽研全端具身智能 港首個實驗室成立 讓AI「看到聽到想通做到」 落實與24家巨擘開展合作
- 普通話
- 廣東話
- 超大
- 大
- 標準
- 小


香港中文大學InnoHK香港物流機械人研究中心昨日宣布成立「香港具身智能實驗室」,為全港第一個覆蓋控制算法、操作算法、關節模組、機械人硬件等全端具身智能核心技術研發的實驗室,其團隊此前已自主研發香港首個人工智能(AI)機械人平台,並成功於視覺語言模型系統和四足機械人成果作進一步突破和優化,希望能成為工業與服務場景的操作平台,為人類生活執行各式任務。實驗室昨日亦落實與24家業界夥伴、投資機構及創科企業開展合作,以加速具身智能科研成果的轉化與產業落地,推動前沿技術走進日常應用,普惠市民,提升生活品質,並助力香港建設國際創新科技中心。
●香港文匯報記者 陸雅楠
國家「十五五」規劃前瞻布局未來產業,支持具身智能成為新的經濟增長點,香港亦積極對接國家戰略及「人工智能+」行動,着力推動具身智能等策略性新興產業加快發展。致力推動有關發展的港中大InnoHK香港物流機械人研究中心進一步整合其研究資源,成立包含全端具身智能核心技術的實驗室,為AI賦予「身體」讓其與物理環境深度融合,不只是處理資訊的演算法,而是能結合各種硬件做到「看得見、聽得到、想得通、做得到」,能在真實場景中執行複雜任務。
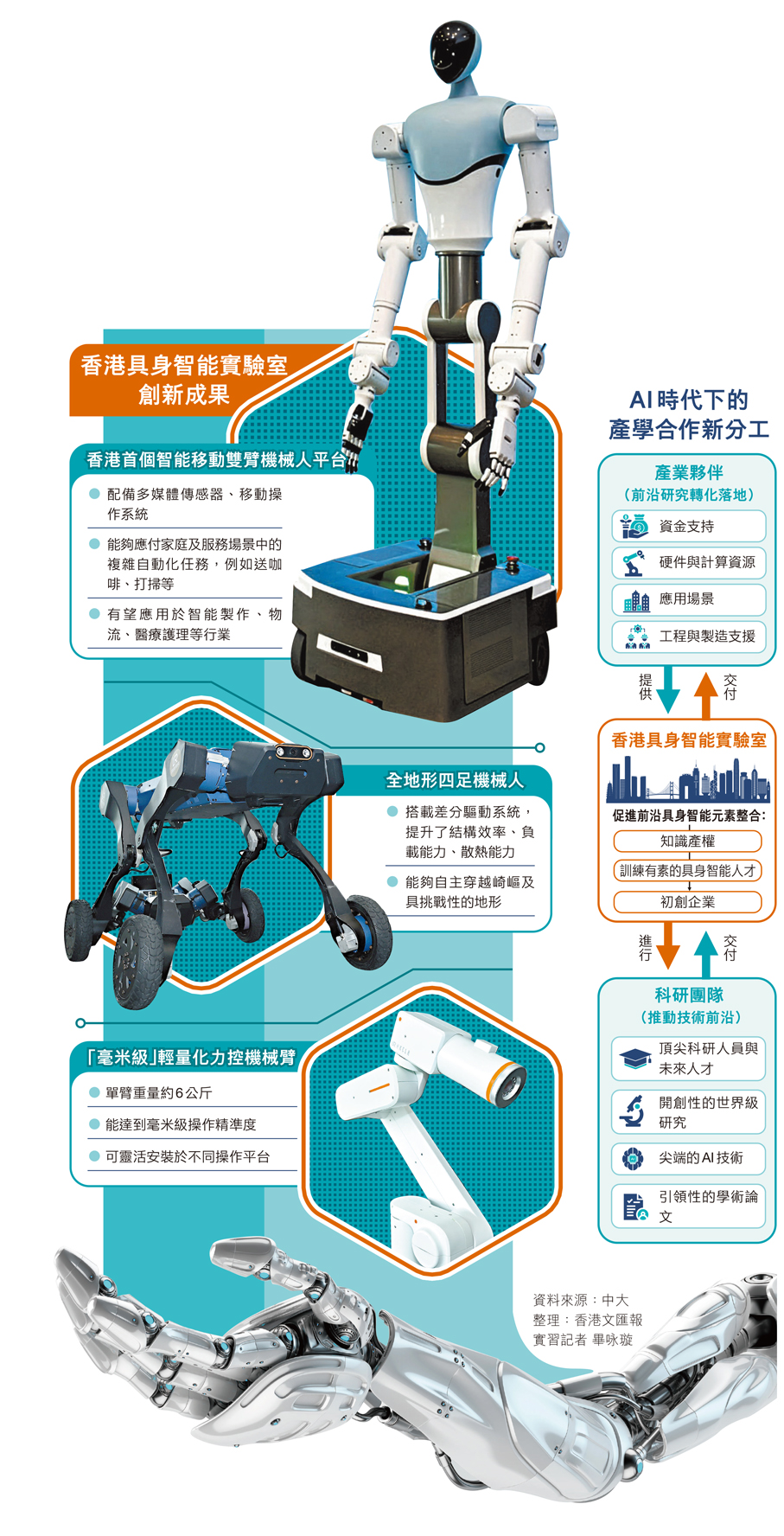
昨日成立儀式亦展出實驗室團隊多項創新成果,包括香港首個可處理家庭及服務場景複雜任務的智能移動雙臂機械人平台、具毫米級操作精準度的輕量化力控機械臂,以及可自主穿越崎嶇地形的全地形四足機械人,展示技術在物流、智能製造及服務業的應用潛力。
讓人類從重複性勞動中解放
香港物流機械人研究中心副總監竇琪介紹指,團隊近期進一步研發能應用於具身智能系統的創新視覺語言模型,強化「以物體為中心」場景中的空間感知能力,提升AI機械人在多步驟、跨時序任務中的視覺智能與決策能力。技術包含幾項關鍵突破,包括可透過視覺理解能力,運用生成式AI對場景中的不同物體進行辨識與建模;從既有視覺基礎模型中提取空間資訊及可操作性訊息;再將上述資訊輸入大語言模型進行空間感知與任務規劃,把複雜任務拆解為可逐步執行的操作步驟,推進具身智能在更貼近真實場景中的應用。
香港具身智能實驗室聯合總監李鐘毓提到,團隊以去年底亮相的四足機械人為基礎,已進一步提升硬件穩定性和移動能力,讓其可於樓梯、草地、斜坡及泥濘路面等多種地形行走。團隊並正研究如何有效控制熱量、防止電機過熱,持續提升機械人的負載能力、續航表現與熱管理水平,以延長可持續運行時間。此外,團隊也在追求更通用、更接近人類形態的機械人平台,現正逐步為機械人配備手臂,令其不再只是「移動平台」,進一步成為「操作平台」。
李鐘毓又指,團隊的研究焦點,是讓機械人能有效學習適應各種為人類設計的場景,例如應對爬樓梯、按電梯、開門等上門派送過程,期望能透過設計通用平台讓機械人完成不同工作,不必再每一次針對特定任務重新設計專用機械人,以達到更佳成本效益。
他表示,團隊目標是讓機械人可基本執行生活服務與工業場景的各類工作:從家庭服務、遞送咖啡、搬運物品、清潔房間、整理會議室、整理床鋪到摺疊衣服等,讓人類從重複性勞動中解放,以從事更具創造性的工作。
此外,物流、醫療保健和老人護理的場景同樣是重要應用方向,「我們希望,未來的機械人能像今天的手機一樣重要和普及。」
在成立的同時,實驗室亦與杭州宇樹科技、智元創新(上海)科技、聯想創投集團、西井控股(香港)等24家業界夥伴、投資機構及創科企業開展合作,將圍繞科研協作、成果轉化、產業應用及投資支持等多個範疇深化對接,攜手應對具身智能領域最具挑戰的難題,加速把技術從概念驗證推向現實落地。
 0
已點過讚
0
已點過讚
評論(0)
0 / 255