


港大工程學者研發新型空中象鼻機器人
- 普通話
- 廣東話
字號

- 超大
- 大
- 標準
- 小

香港文匯報訊 香港大學工程學院機械工程系教授魯鵬及團隊成功研發新型空中象鼻機器人(AET),減低了傳統空中操控器在有效載荷能力和機械臂靈活性等方面的局限,大幅提升了機械臂的空中操控性能,並首次實現連續體機械臂完成各種複雜空中操控任務,有望為低空經濟發展注入新動力。相關研究成果已在國際期刊《自然-通訊》(Nature Communications)上發表。
魯鵬表示:「傳統的空中操控器只能使用夾爪來抓取物體,而我們設計的AET極其靈巧,能夠利用機體末端類似大象鼻子形狀的機械臂抓取各種尺寸和形狀的物體。AET的整個機械臂都可以任意變換成不同形狀,在複雜的環境中執行各項空中任務。」
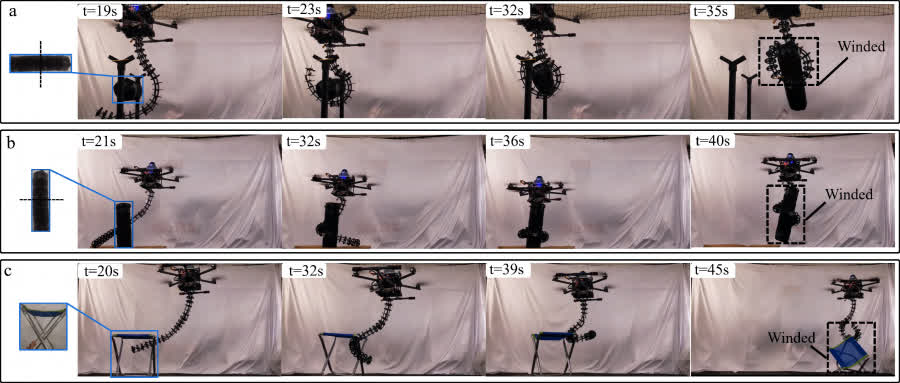
AET能穿越各種形狀的受限管道,即使在障礙物密集的環境中也能自如運作,而傳統空中操控器在類似場景中往往難以施展。團隊相信,AET的卓越靈活性將大幅擴展空中機器人的應用範圍,使其可在空中進行抓取,搬運及維護等工作。例如移除災難現場的雜物、清理高壓電線上的障礙物,以及進行跨海橋樑維修工作等。因此,AET將為低空經濟相關的產業和模式帶來全新發展機遇。
 0
已點過讚
0
已點過讚
評論成功,請等待管理員審核...
評論(0)
0 / 255