


中大研彈性軟材料 能屈能伸應用廣
- 普通話
- 廣東話
- 超大
- 大
- 標準
- 小
可實現多形態轉換 助塑造更靈活機械人
軟材料可以屈曲變形,被廣泛應用於柔性電子裝置和智能系統,例如微型天線、智能黏附裝置、近距離無線通訊裝置等,但現時一般控制軟材料變形的準靜態調控策略只能進行兩種形態配置,未能做到自由度更高和更複雜的多形態動態調控,應用範圍有所局限。香港中文大學的研究團隊發明了一種具有三維(3D)可變形能力的鐵磁性有機矽彈性體,有望塑造更靈活的軟體機械人,及進一步拓展可變形軟材料在工程領域的應用。相關研究成果已於國際著名期刊《自然通訊》(Nature Communications)發表。◆香港文匯報記者 高鈺
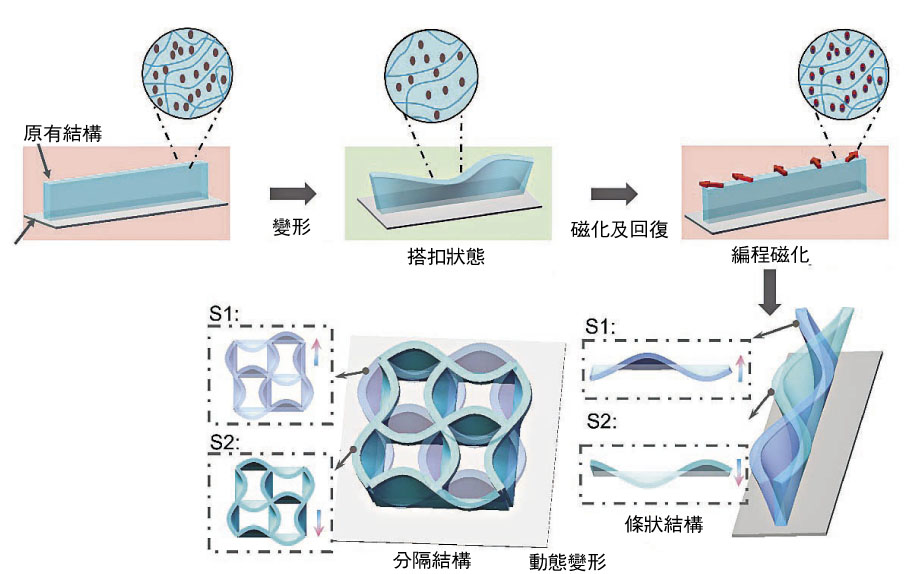
中大機械與自動化工程學系教授張立與金東東博士,聯同香港城市大學張甲晨教授及中國科學技術大學王柳教授,合作開發了一種磁動態調控策略,原理是透過磁場控制軟材料作出更靈活的形態轉換。研究人員將新研發的磁性彈性體固定在玻璃基板上,然後浸入有機溶劑甲苯。甲苯被彈性體吸收後,會在其內部擴散導致膨脹,惟在基板約束下,彈性體會屈曲,自然形成3D複雜波浪式的變形。
團隊在彈性體由膨脹至回復原狀過程中的不同階段施加強脈衝磁場磁化,利用脈衝磁場設定磁性彈性體中的3D磁疇分布,便可通過調節磁場的強度、方向和梯度,控制彈性體作出不同形態的屈曲狀態,實現多形態動態變換。
進一步探索生物醫學應用
張立表示,自然界的生物通過高度可控的形態轉變以適應環境,例如葉面有皺紋的植物可改變表面面積來調節水合作用,而刀魚則通過調節其波浪形帶狀鰭來控制游動方向,包括向前或向後移動,或停留在原地不動。團隊受到刀魚可隨意屈曲的波浪形魚鰭啟發,研製出可自由屈曲變形的磁性彈性體,實現3D結構在不同維度尺度下的多形態轉換。其團隊計劃將磁性彈性體應用於微型機械人,並進一步探索相關生物醫學的應用。
上述研究得到香港研究資助局、香港創新科技署、裘槎基金會、中大天石機器人研究所、中大─中國科學院深圳先進技術研究院機器人與智能系統聯合實驗室、創新香港研發平台(InnoHK)的醫療機器人創新技術中心(MRC)的支持。
 0
已點過讚
0
已點過讚
評論(0)
0 / 255