


【專家解讀】中國「擎天臂」再顯神威 操作精度要求更高
- 普通話
- 廣東話
- 超大
- 大
- 標準
- 小
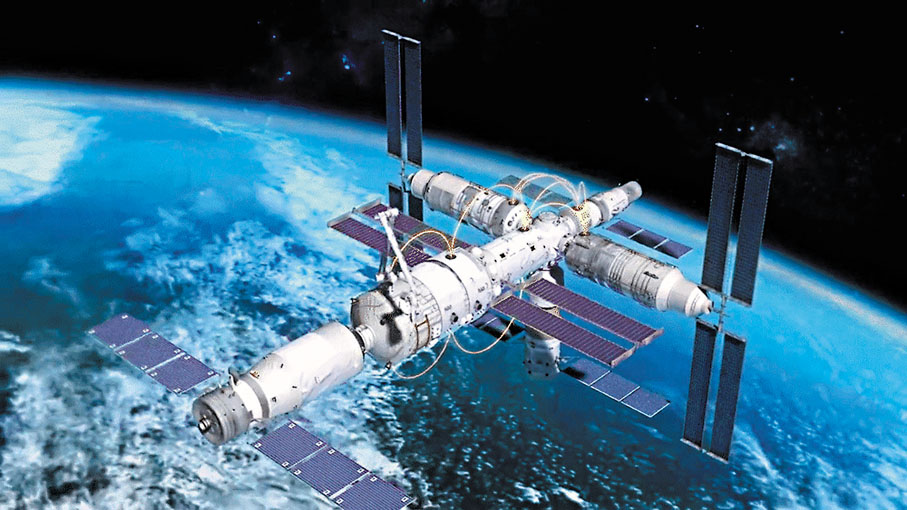
在神舟十三號航天員的第二次出艙活動中,由中國航天科技集團五院抓總研製的中國太空站核心艙機械臂再次大顯神威,托舉神舟十三號飛行乘組航天員順利完成出艙操作,成功按照預定時間圓滿完成艙外設備安裝等既定任務。與此前的出艙任務相比,此次出艙抬升艙外全景攝像機C,對機械臂的操作要求更高。
據航天科技集團五院空間站系統機械臂技術負責人胡成威介紹,此次出艙活動的一項重要任務就是機械臂輔助航天員抬升艙外全景攝像機C。此前(出艙活動完成前),全景相機C安裝緊貼艙體外壁,拍攝範圍有限。通過此次抬升,航天員將給相機安裝一個支架,以便相機視角更寬闊,能夠看得更遠,更有利於觀察艙表狀態和航天員艙外活動。
需避開艙外設備免碰撞
胡成威表示,此次相機位置比較特殊,機械臂需要避開艙外設備,安全性和控制精度要求都很高,機械臂運動時需要更加平穩、精確,否則稍不留神就可能會發生碰撞危險。為此,機械臂研製團隊配合太空站系統開展大量仿真工作,進行多次飛行程序推演以及1:1模擬演練,對相關指令、數據進行了細緻核對,對飛控協同程序和故障預案等文件進行討論,確保各崗位人員熟悉協同流程,對故障預案了然於心,能第一時間做好應急處置,並通過可視化手段等全面驗證了任務的可行性和安全性,最終確保了機械臂輔助航天員出艙任務順利完成。
攜帶航天員大範圍轉移
此次機械臂托舉航天員出艙活動還有一個任務是轉移航天員到目標作業點安裝艙表腳限位器。航天科技集團五院空間站系統機械臂飛控負責人高升表示,在抬升全景相機C工作完成後,機械臂將攜帶航天員進行大範圍轉移,繞核心艙半圈,達到新的目標位置。航天員在機械臂的支撐下,完成艙表腳限位器設備安裝。這個設備主要是能夠固定航天員的雙腳,提高航天員的艙表作業能力,確保其在後續工作時騰出雙手,完成更多更複雜的作業任務。●香港文匯報記者劉凝哲 北京報道
 0
已點過讚
0
已點過讚
評論(0)
0 / 255