自導航人形機器人 半馬破人類紀錄 北京亦莊賽事較上屆擴容5倍 國內外超百支隊伍參賽




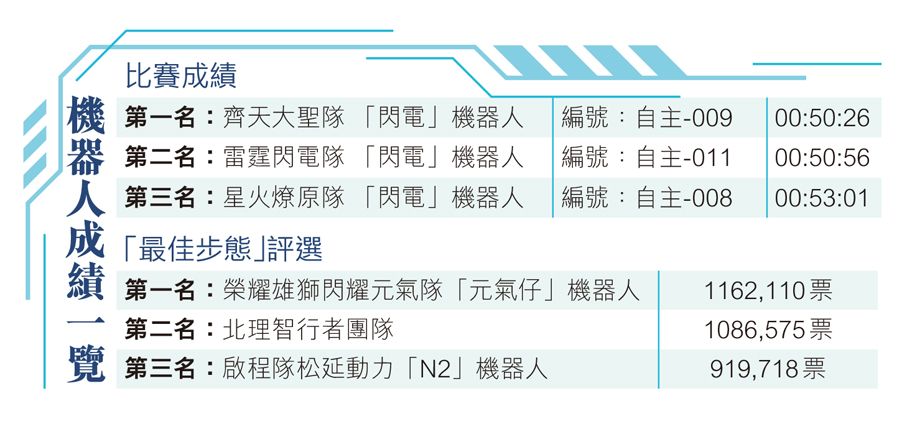

全球首個人形機器人馬拉松品牌賽事——2026北京亦莊半程馬拉松暨人形機器人半程馬拉松鳴槍開跑,超百支人形機器人賽隊與1.2萬人共同參賽。經過激烈角逐,深圳榮耀智慧科技開發有限公司齊天大聖隊的「閃電」機器人以50分26秒的淨時成績奪得冠軍,這一成績超越烏干達名將基普利莫在今年3月里斯本半程馬拉松賽中創造的57分20秒的人類男子半程馬拉松世界紀錄。雷霆閃電隊、星火燎原隊分獲亞軍和季軍,淨用時分別為50分56秒、53分01秒,三支戰隊的參賽機器人均為自主導航機器人。
●香港文匯報記者 馬曉芳、郭瀚林、蘇雨潤 北京報道
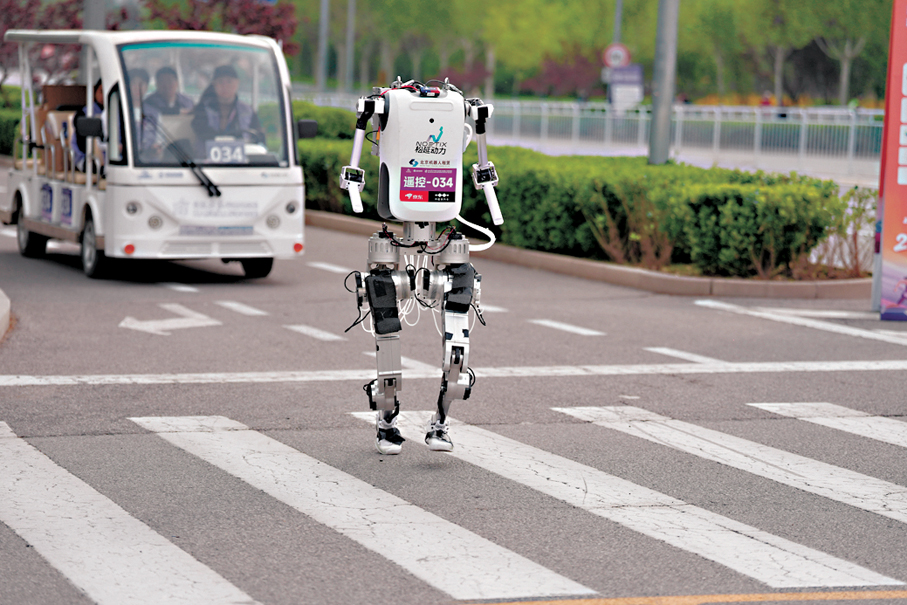
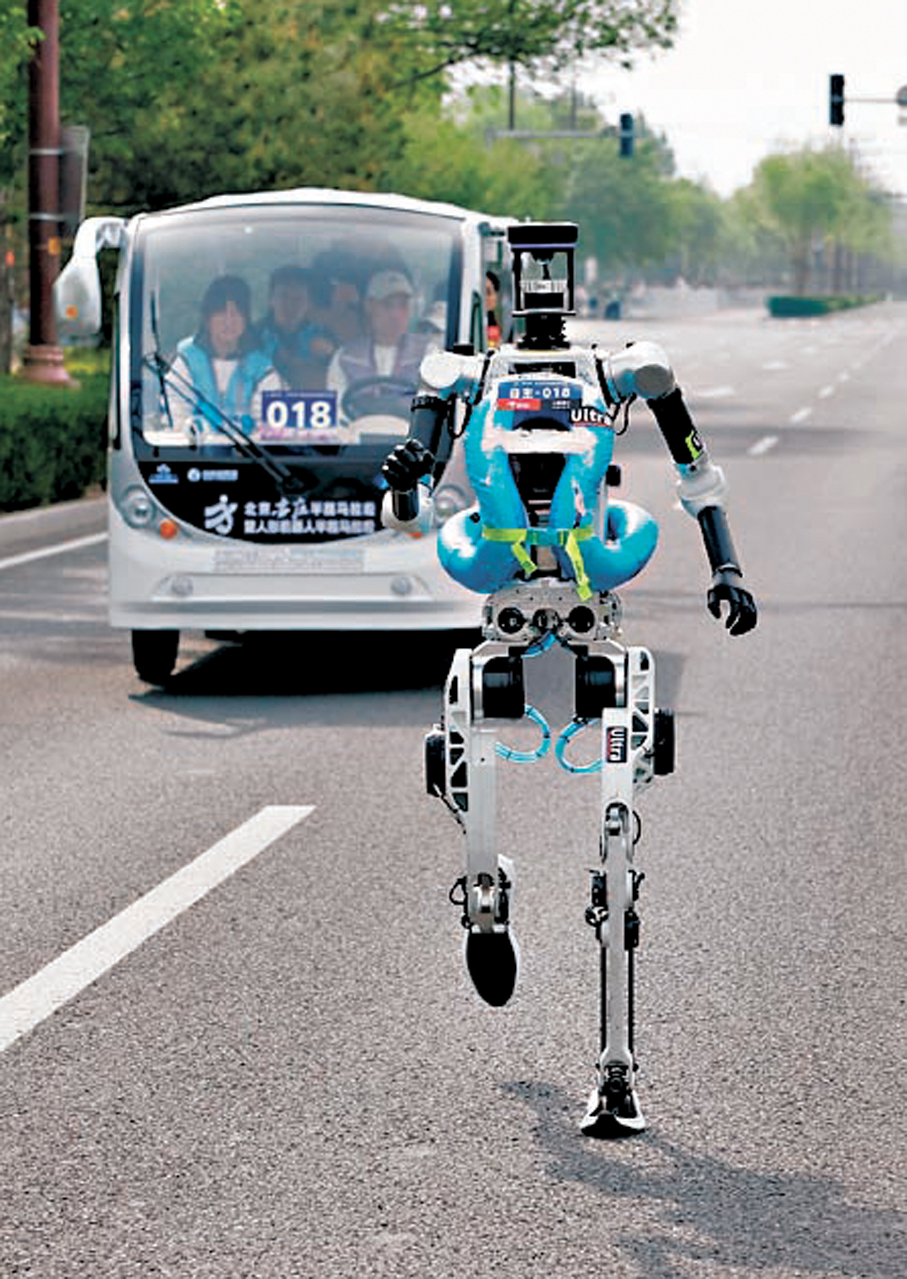
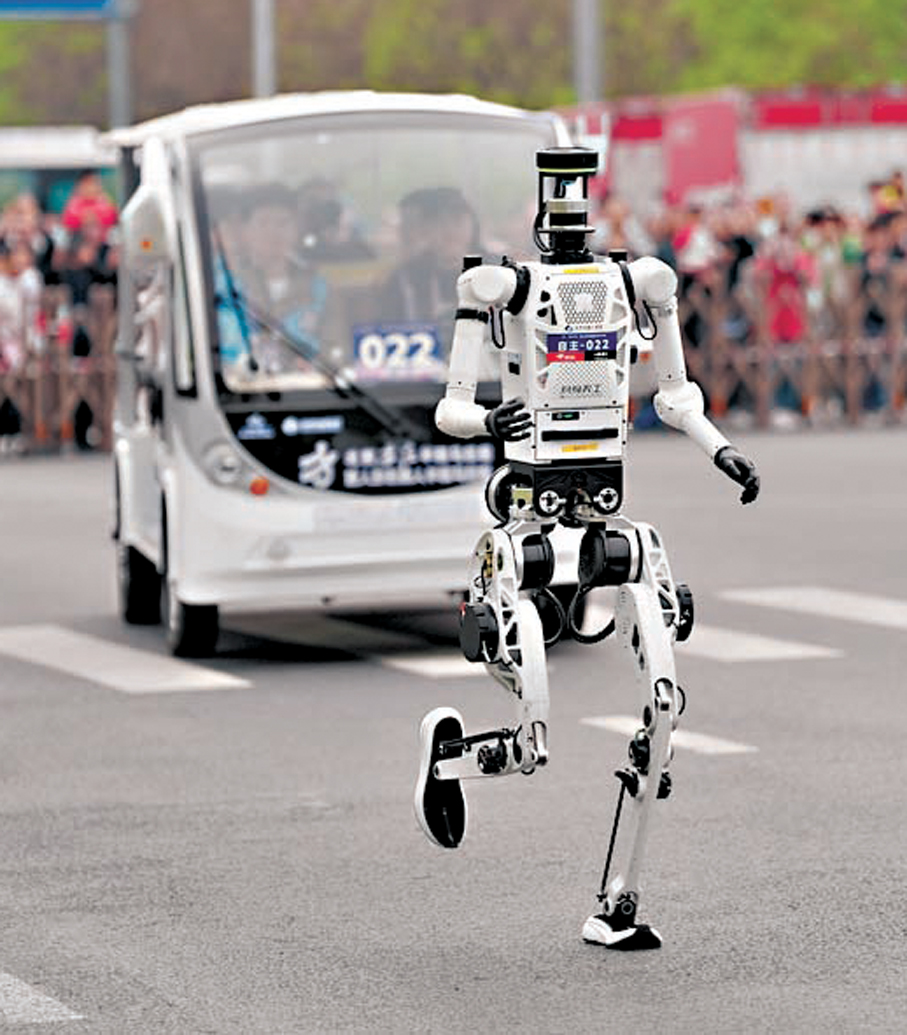
早上7時30分,隨着發令槍響,人形機器人和人類跑者同時起跑,中間由隔離帶分隔,一起參加21.0975公里的半程馬拉松比賽。賽道上,百餘台人形機器人採用流水線式依次單發起跑,兩兩間隔30秒。榮耀機器人勢如閃電,「具身天工」跑姿高度擬人,宇樹機器人邁開長腿奮力奔跑……
含宇樹等頭部企業
香港文匯報記者現場了解到,本屆賽事規模較上一年度擴容近5倍,吸引全國11個省份超百支隊伍參賽。參賽主體覆蓋北京人形機器人創新中心、榮耀、宇樹、松延動力等頭部企業,以及清華、北大、中國科大等高校和科研院所,並拓展國際賽隊5支,涵蓋德國、法國、葡萄牙、巴西等多個國家的優秀團隊。技術類型涵蓋自主導航與遙控兩大類別,其中自主導航佔比近四成,參賽數量、參與範圍、技術類型均創歷史新高。
參賽方式:自主導航與遙控
賽事設置自主導航和遙控兩種參賽方式,兩個組別加權系數分別為淨時成績的1.0與1.2。榮耀旗下「閃電」機器人的遙控版本以48分19秒率先衝線,由於賽事規則對遙控機器人附加1.2倍加權系數,其成績被修正至約57分鐘,最終未能奪冠。「1.2系數的設定,旨在引導、鼓勵自主導航技術研發,為人形機器人在日常生活中更多實際應用場景的落地打下基礎。」中國電子學會副秘書長梁靚說。
榮耀「閃電」50分26秒奪冠
經過一年的快速發展,今年跑道上的機器人進步神速。經過激烈角逐,採用自主導航模式的齊天大聖隊「閃電」機器人憑借50分26秒的成績獲得冠軍。與去年首屆賽事相比,本屆賽事實現跨越式突破。去年首屆人形機器人半程馬拉松中,天工隊的人形機器人「選手」以2小時40分42秒奪冠,完賽隊伍僅有6支。
健步如飛的榮耀人形機器人「閃電」,身高169cm,外觀採用潮酷機甲風設計,兼顧空氣動力學與視覺衝擊力,核心競爭力是速度與爆發力,此次參賽的機型包括自主導航和遙控操作兩款。榮耀工程師姚彬在賽後介紹,機器人所搭載的電機與控制算法均為自研,散熱技術也源自榮耀在手機領域長期積累的工程能力。據介紹,「閃電」是參考人類優秀運動員身材,設計之初便擁有一雙「大長腿」,具備強大的液冷系統,助力行進途中散熱。該自主導航款機器人具備自主感知導航能力,搭載自研高動態運動系統,具有高速奔跑與強地形通過適應能力。
8度上坡等10餘種地形
據賽事主辦方介紹,賽程全長21.0975公里,今年賽道設計融合平地、坡道、彎道、狹窄路段等10餘種地形,設置最大8%上坡、6%下坡及累計100米爬升,考驗機器人動力控制與能源管理效率。12個左轉道、10個右轉道,包含接近90度的銳角彎道,要求機器人具備厘米級路徑規劃與動態平衡能力。5處變窄路段、1處路島障礙,模擬城市道路中的突發狀況,檢驗機器人環境感知與自主決策水平。這些設計為機器人提供了從「實驗室測試」到「真實場景應用」的關鍵過渡場景,全球參賽團隊將在此獲取寶貴數據,推動具身智能、運動控制等核心技術加速突破。
